Filtro Morfológico Simples no WebODM
Métodos automatizados para classificação confiável de nuvens de pontos são uma área ativa de pesquisa, onde o Filtro Morfológico Simples (Simple Morphological Filter – SMRF), algoritmo implementado no WebODM, funciona notavelmente bem, desde que se saiba realizar alguns ajustes. Os usuários que desejam gerar um Modelo Digital do Terreno (MDT) de alta qualidade devem sempre verificar novamente os resultados e ajustar as opções do SMRF conforme necessário.
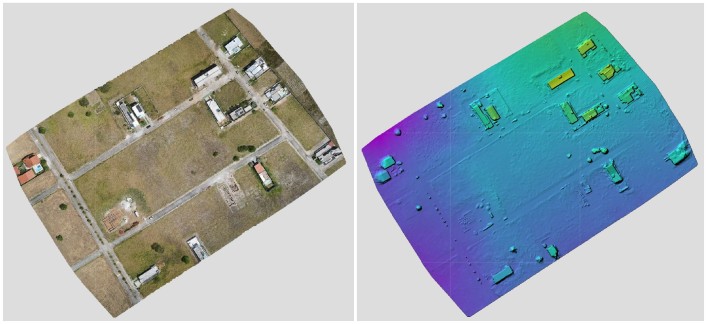
Os pontos em uma nuvem de pontos (Point Cloud) podem receber um dos vários valores de classificação para indicar se um ponto faz parte do terreno (solo), de uma construção, de uma árvore (vegetação) e várias outras classificações possíveis para arquivos LAS (nuvem de pontos).
No processamento no WebODM, por padrão, cada ponto é simplesmente rotulado como não classificado e o software não tenta rotular o que cada ponto representa. Mas ao ativar esta opção, o SMRF é utilizado para tentar encontrar os pontos estão ao nível do terreno e atribuir a eles um valor de classificação de solo. O resultado do processamento é uma nuvem de pontos dividida entre pontos de solo (ground) e não-solo (non-ground). A nuvem de pontos no solo pode então ser usada para fins de interpolação de um MDT.
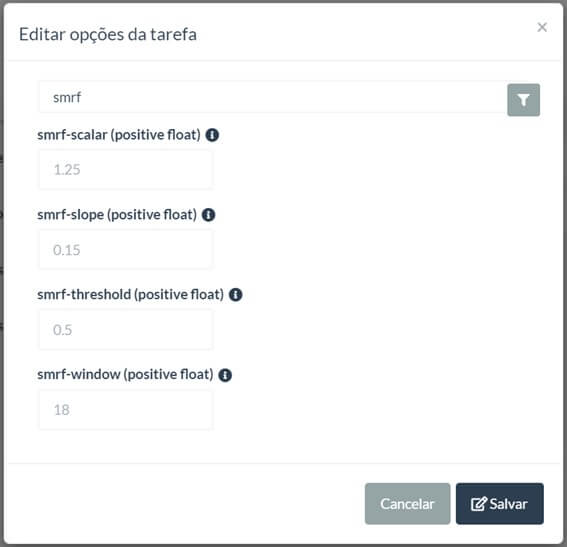
Neste artigo, vamos entender como controlar o algoritmo SMRF para filtragem da nuvem de pontos através de quatro opções:
- smrf-scalar: parâmetro escalar de elevação do filtro morfológico simples
- smrf-slope: parâmetro de inclinação do filtro morfológico simples
- smrf-threshold: parâmetro de limite do filtro morfológico simples
- smrf-window: raio da janela do filtro morfológico simples
Ajuste dos parâmetros do Filtro Morfológico Simples no WebODM
- smrf-slope: deve ser definido para a maior inclinação comum do terreno, expressa como uma razão entre a mudança na elevação e a mudança na distância horizontal (se a elevação mudar em 1,5 metros em uma distância de 10 metros, ou seja, 1,5 / 10 = 0,15). Deve ser aumentada para terrenos com grande variação de declividade (morros, montanhas) e diminuída para áreas planas. Dica: Para melhores resultados, deve ser superior a 0,1, mas não superior a 1,2. Valor padrão: 0.15
- smrf-threshold: especifica a altura mínima (em metros) de objetos não terrestres. Por exemplo, definir um valor de 5 provavelmente será suficiente para identificar edifícios, mas não será suficiente para identificar carros. Para identificar os carros, o valor deve ser reduzido para 2 ou até 1,5 (a altura média do carro). Valor padrão: 0.5
Importante: Este parâmetro sozinho tem o maior impacto nos resultados.
- smrf-scalar: é usado para tornar o parâmetro de limite (threshold) dependente da inclinação. Para melhorar os resultados, esse valor pode ser ligeiramente diminuído se o valor do limite smrf-threshold for aumentado e vice-versa. Valor padrão: 1.25
- smrf-window: deve ser definido para o tamanho da maior feição não terrestre (em metros). Por exemplo, se uma cena estiver cheia de pequenos objetos (árvores), esse valor pode ser diminuído. Se a cena contiver objetos grandes (edifícios), esse valor pode ser aumentado. Recomenda-se manter este valor acima de 10. Valor padrão: 18
Considerações importantes
- Primeiramente, para que os parâmetros utilizados façam sentido e realmente haja classificação da nuvem de pontos, é necessário ativar a opção pc-classify:
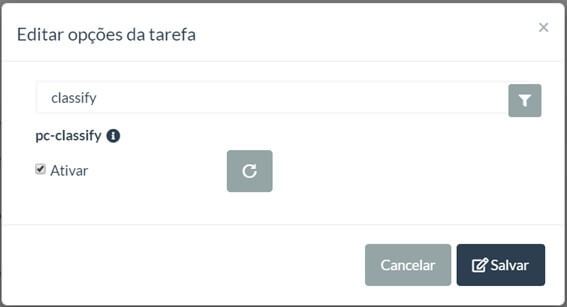
- é recomendável experimentar os valores padrão do WebODM e, após o processamento das fotografias, examinar os resultados do SMRF, fazendo os ajustes em um novo processamento da nuvem de pontos, caso seja necessário.
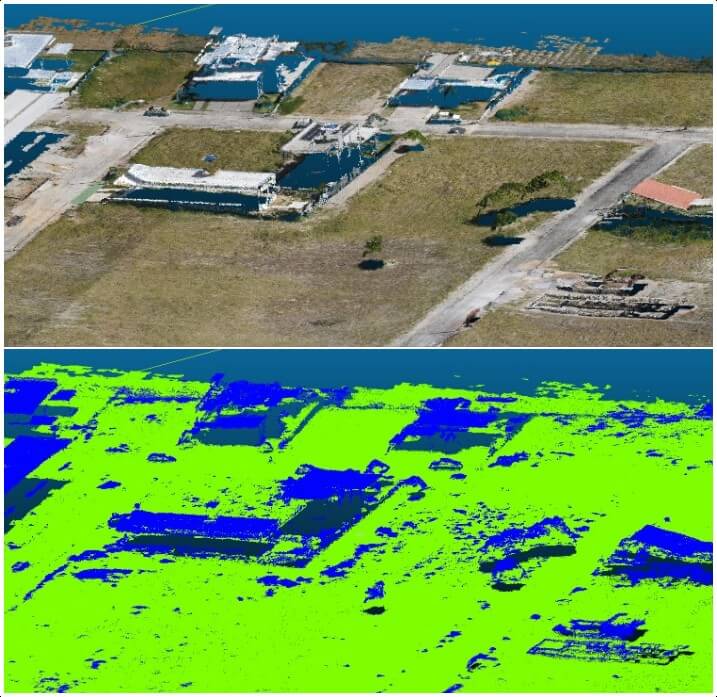
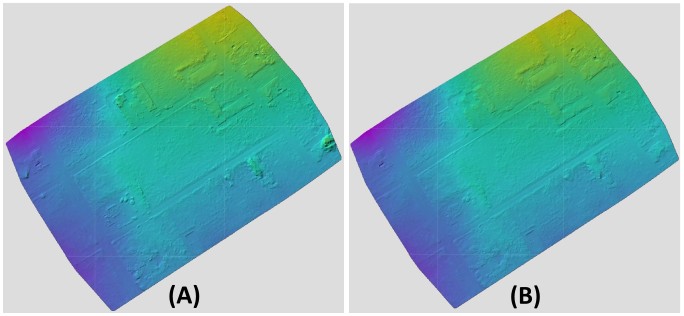
Na Figura 5, observa-se em (A) o MDT gerado com as opções padrão (default) do SMRF, onde parte de algumas casas foram incluídas por engano no modelo e artefatos permanecem nas bordas dos objetos removidos. Já em (B), o MDT foi melhorado utilizando novos parâmetros: smrf-threshold 0,3 (diminuído), smrf-scalar 1,3 (aumentado), smrf-slope 0,05 (diminuído) e smrf-window 24 (aumentado).
Estudos Científicos sobre SMRF
É importante ter em mente que o SMRF tem limitações e, por isso, devemos entendê-las. Em particular, o filtro às vezes poderá classificar erroneamente pontos que pertencem a edifícios ou árvores como pontos de solo (erros do tipo II – falso negativo), ou contrário classificando solo como não-solo (erros do tipo I – falso positivo).
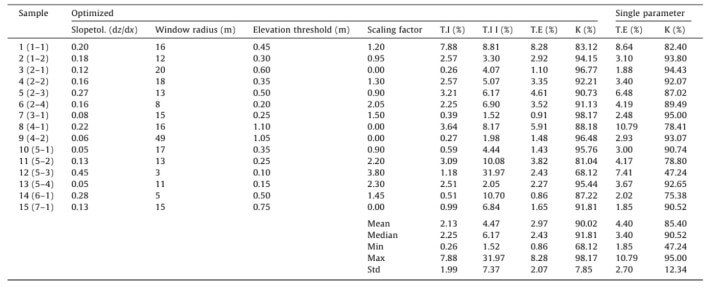
A Tabela abaixo mostra alguns parâmetros utilizados por Pingel et al. (2013) e os resultados otimizados e de parâmetro único do algoritmo SMRF testado contra o conjunto de dados de referência, em taxa de erro tipo I (T.I), taxa de erro tipo II (T.II), taxa de erro total (T.E) e Kappa (K, %) . Resultados de parâmetros únicos foram obtidos usando valores para tolerância de inclinação, raio de janela, limite de elevação e fator de escala, respectivamente.
Outras técnicas de filtragem de nuvem de pontos:
Às vezes também vale a pena comparar os resultados da classificação com aqueles obtidos de métodos de classificação supervisionados ou treinados. CloudCompare (CC) é um software gratuito e de código aberto que possibilita executar outros métodos.
Duas soluções do CC se destacam na classificação de nuvem de pontos:
Aprenda muito mais sobre Processamento de imagens de Drone no nosso curso:
Referências:
PINGEL, Thomas J.; CLARKE, Keith C.; MCBRIDE, William A. An improved simple morphological filter for the terrain classification of airborne LIDAR data. ISPRS Journal of Photogrammetry and Remote Sensing, v. 77, p. 21-30, 2013.
PIERO TOFFANIN. 2019. OpenDroneMap: The Missing Guide. A Practical Guide To Drone Mapping Using Free and Open Source Software: https://odmbook.com/