Cálculo de Sobreposição em Plano de Voo para Drone
A aerofotogrametria é uma técnica essencial para obter informações detalhadas sobre objetos e áreas na superfície terrestre por meio de fotografias aéreas. Inicialmente, as primeiras imagens aéreas foram capturadas utilizando balões e pombos. Com o progresso tecnológico, a prática evoluiu para o uso de aviões, satélites e, atualmente, sistemas de aeronaves não tripuladas (UAS), também conhecidos como drones. Esses avanços tornaram a aerofotogrametria mais acessível e eficiente, ampliando suas aplicações em diversas áreas, como cartografia, engenharia e monitoramento ambiental.
Para que a aerofotogrametria seja realizada com precisão, é essencial saber elaborar um plano de voo eficaz que garanta a sobreposição lateral (linhas de voo paralelas) e frontal (ao longo da linha de voo) das imagens capturadas. Esse planejamento é fundamental para assegurar a cobertura completa da área de interesse e a qualidade das imagens obtidas.
Neste artigo, exploraremos conceito relacionados ao plano de voo e aos parâmetros do sensor, essenciais para calcular, utilizando Python, a distância entre as linhas de voo e as fotografias no aerolevantamento. Esses conhecimentos são indispensáveis para otimizar o processo de coleta de dados e garantir resultados precisos e confiáveis.
Tópicos:
Características do Sensor para a Escala do Mapeamento
Distância Focal e Campo de Visão (FOV)
O que é Ground Sampling Distance (GSD)?
Tamanho do Sensor e Distância Focal
Cálculo dos Parâmetros no Plano de Voo com Python
Características do Sensor para a Escala do Mapeamento
Distância Focal e Campo de Visão (FOV)
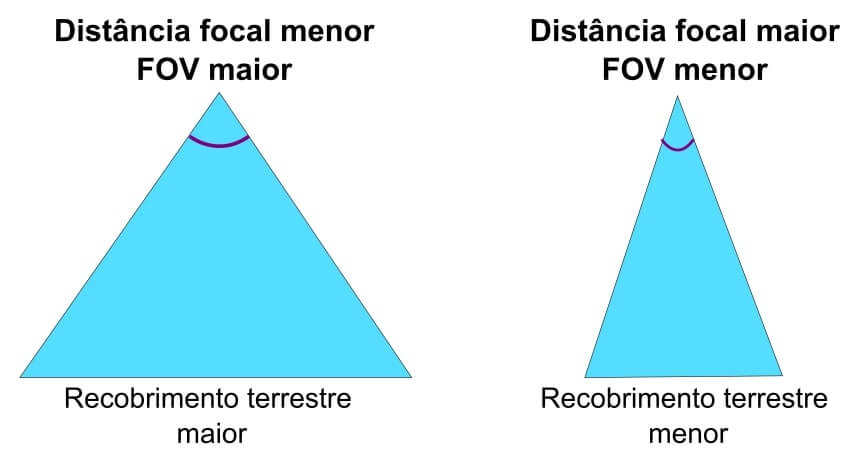
A distância focal de uma câmera é a distância do centro da lente ao plano focal. Essa medida, geralmente expressa em milímetros (mm), determina a ampliação e o ângulo de visão da câmera. Um comprimento focal maior resulta em uma maior ampliação e um campo de visão (Field of View – FOV) menor, enquanto um comprimento focal menor cobre uma área maior com menor ampliação.
Escala da foto
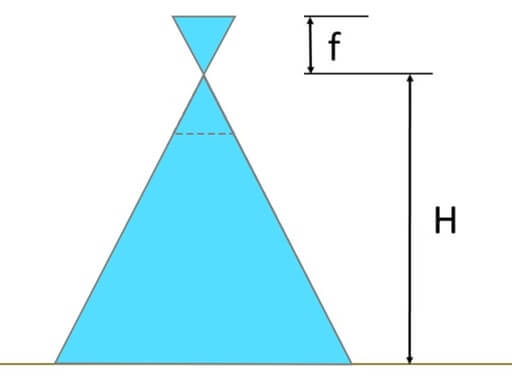
A escala de uma foto é igual à razão entre a distância focal da câmera e a altitude da aeronave acima do nível do solo (Above Ground Level – AGL) sendo fotografada. Se a distância focal e a altitude de voo acima da superfície forem conhecidas, a escala pode ser calculada usando a seguinte fórmula:
(1) 
Onde:
- E é a escala da fotografia.
- f é a distância focal da câmera.
- H é a altura de voo acima do nível do solo.
Considerações Importantes:
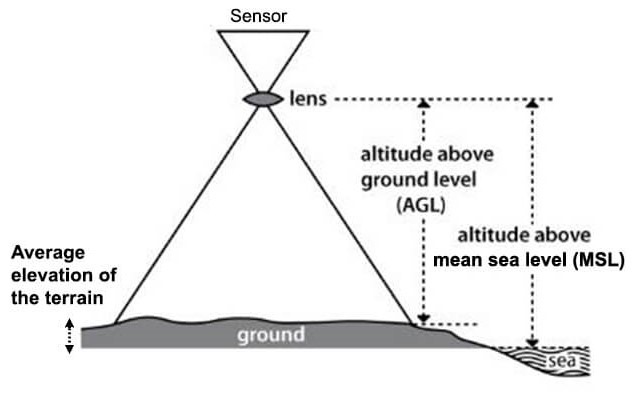
- Altura de voo (AGL vs MSL): A altura de voo deve ser medida em relação ao solo (AGL) para garantir uma escala precisa. Se a altitude acima do nível do mar (MSL) for fornecida, deve-se subtrair a elevação média do terreno para obter a altura AGL.
- Correções para Terreno Irregular: Em áreas com terreno irregular, pode ser necessário ajustar a altura de voo para manter uma escala constante.
O que é Ground Sampling Distance (GSD)?
O Ground Sampling Distance (GSD) refere-se ao tamanho real de cada pixel na superfície terrestre. Esse valor é usado para determinar a resolução espacial da imagem capturada. O GSD depende da altura de voo, do tamanho do sensor e da distância focal da câmera.
Tamanho do Sensor e Distância Focal
A escolha dos parâmetros da câmera de um drone depende do objetivo do mapeamento e da área a ser coberta. Câmeras com distância focal maior são indicadas para mapeamentos que requerem alta resolução e detalhamento, enquanto distâncias focais menores são ideais para cobrir áreas maiores.
A tabela a seguir apresenta os tamanhos dos sensores e distâncias focais para alguns drones DJI:
| Drone | Tamanho do Sensor | Distância Focal |
| Phantom 4 Pro / Advanced | 13.2 x 8.8 mm | 8.8 mm |
| Phantom 3/4 | 6.3 x 4.7 mm | 3.61 mm |
| Phantom 4 Multispectral | 4.98 x 4.74 mm | 5.74 mm |
| Mavic Pro | 6.33 x 4.75 mm | 4.7 mm |
| Mavic 2 Pro | 13.2 x 8.8 mm | 10.26 mm |
| Mavic 2 Zoom | 6.3 x 4.7 mm | 8.6 mm |
| Mavic 3E | 17.3 x 13 mm | 12.3 mm (Wide) |
| Air 2S | 13.2 x 8.8 mm | 8.38 mm |
| Mavic Air | 6.3 x 4.7 mm | 4.9 mm |
| Mavic Air 2 | 6.4 x 4.8 mm | 4.5 mm |
| Mini | 6.3 x 4.7 mm | 4.49 mm |
| Mini 2 | 6.3 x 4.7 mm | 4.49 mm |
| Mini 3 | 9.7 x 7.3 mm | 7 mm |
| Mini SE | 6.3 x 4.7 mm | 4.49 mm |
| Zenmuse X4S | 12.83 x 8.55 mm | 8.60 mm |
| Zenmuse H20 Thermal | 7.68 x 6.14 mm | 13.5 mm |
| Zenmuse H20 Wide | 6.16 x 4.62 mm | 4.5 mm |
| Zenmuse H20 ZoomMin | 7.76 x 5.82 mm | 10.1 mm |
| Zenmuse Z30 Min | 4.71 x 3.54 mm | 4.3 mm |
| Anafi 4K | 12.83 x 8.56 mm | 8.6 mm |
| Evol 8K | 6.4 x 4.8 mm | 4.85 mm |
Não encontrou o modelo do seu drone na tabela acima? Clique aqui para pesquisar o tamanho do sensor e a distância focal de outros modelos.
Cálculo dos Parâmetros no Plano de Voo com Python
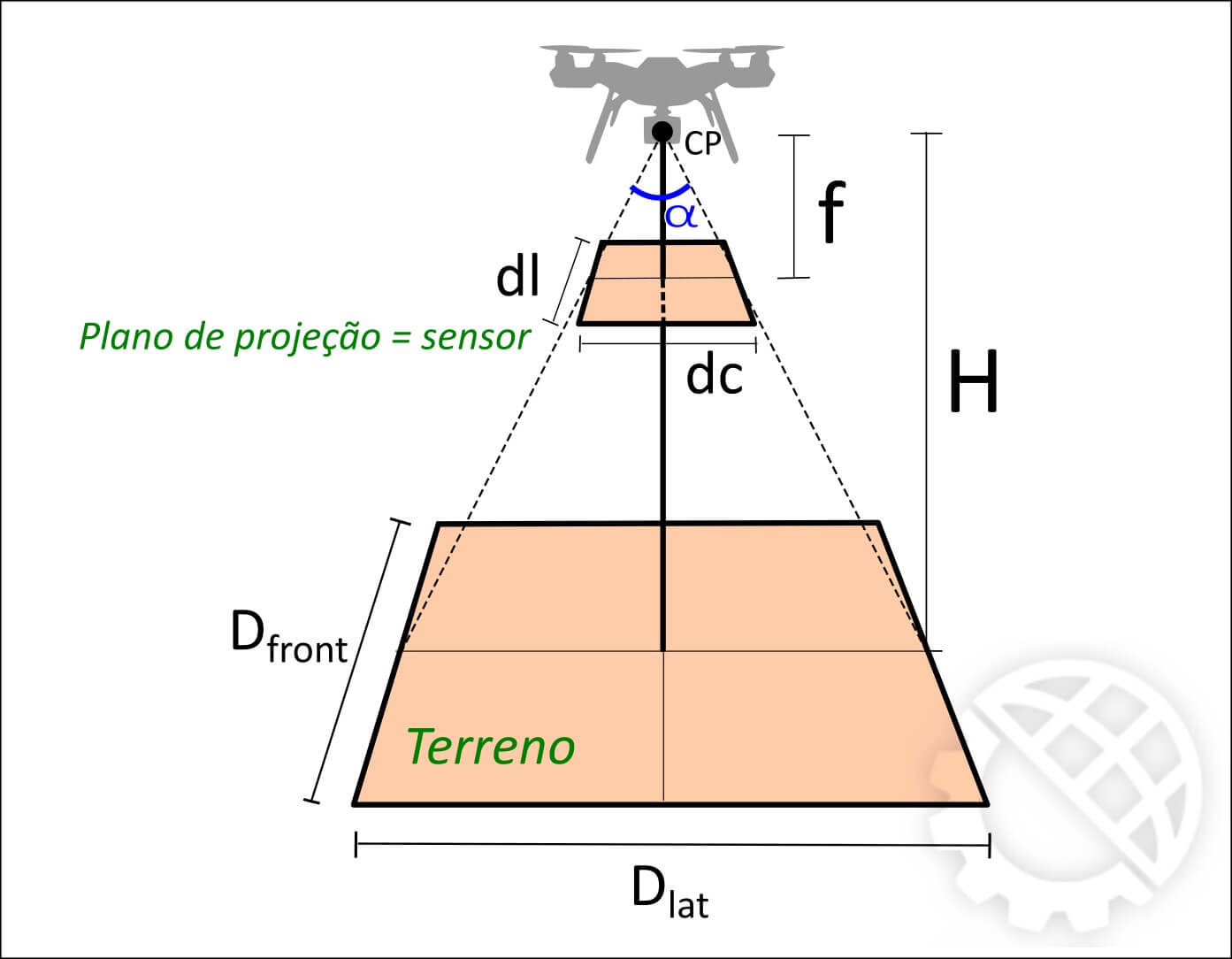
A figura abaixo apresenta o plano de projeção (sensor) e seu tamanho dados por dl e dc, vertical e horizontal, respectivamente. Também estão representadas as medidas da distância focal (f) e altura de voo (H) em relação ao terreno.
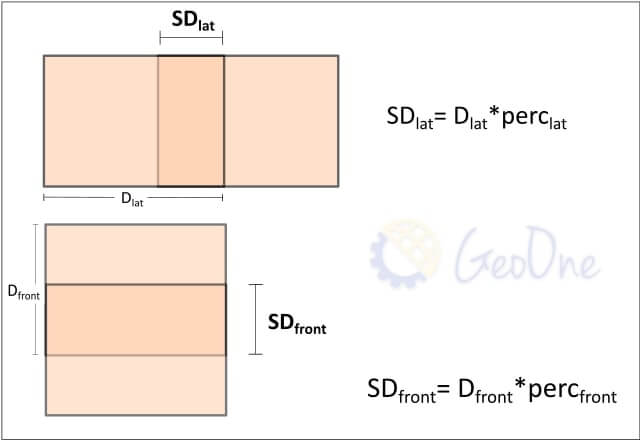
A sobreposição SD_lat e SD_front são obtidas a partir do percentual de sobreposição entre as fotografias dado por perc_lat e perc _front.
Observação: A sobreposição mínima recomendada para aerolevantamento com drone é de 65% lateral e 75% frontal. Clique aqui para ver mais dicas de qualidade para as fotos de drone.
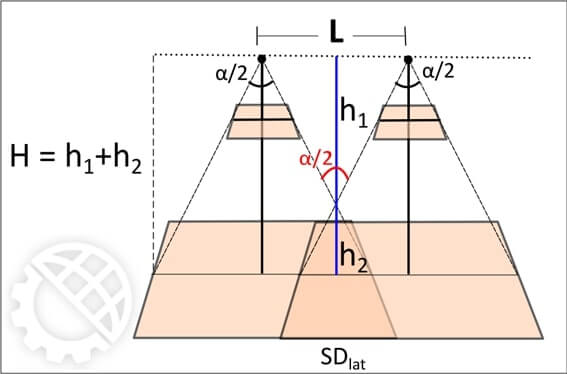
A distância (L) de espaçamento entre as linhas laterais do plano de voo é indicada na Figura abaixo:
O espaçamento frontal para cada fotografia, seguindo a linha de voo, segue raciocínio análogo, sendo a formulação matemática dada por:
(2) 
(3) 
(4) 
(5) 
(6) 
Algoritmo Python para Plano de Voo
Este script Python mostra como obter o espaçamento lateral e frontal para um plano de voo, sabendo-se a distância focal, tamanho do sensor e altitude de voo.
# Função para calcular o espaçamento lateral entre as linhas de voo paralelas
def espacamento_lateral(dc, f, H, perc_lat):
tg_alfa_2 = dc / (2 * f)
D_lat = dc * H / f
SD_lat = perc_lat * D_lat
h1 = SD_lat / (2 * tg_alfa_2)
delta_lat = SD_lat * (H / h1 - 1)
return delta_lat
# Função para calcular o espaçamento frontal entre as fotografias
def espacamento_frontal(dl, f, H, perc_front):
tg_alfa_2 = dl / (2 * f)
D_front = dl * H / f
SD_front = perc_front * D_front
h1 = SD_front / (2 * tg_alfa_2)
delta_front = SD_front * (H / h1 - 1)
return delta_front
# Exemplo de uso com dados de um Phantom 4 Pro (5472 × 3648)
dc = 13.2e-3 # tamanho do sensor (horizontal - colunas)
dl = 8.8e-3 # tamanho do sensor (vertical - linhas)
f = 9e-3 # distância focal
H = 120 # altura de voo
perc_lat = 0.6 # percentual de sobreposição lateral
perc_front = 0.75 # percentual de sobreposição frontal
# Calculando os espaçamentos
delta_lat = espacamento_lateral(dc, f, H, perc_lat)
delta_front = espacamento_frontal(dl, f, H, perc_front)
# Imprimindo os resultados
print('Sobreposição lateral: ', round(delta_lat, 1))
print('Sobreposição frontal: ', round(delta_front, 1))
Curso de Processamento de Imagens de Drone com WebODM e QGIS
A aerofotogrametria com drones (UAVs) oferece vantagens significativas em relação aos métodos tradicionais de mapeamento, incluindo menor custo, maior segurança e capacidade de capturar dados de alta resolução em áreas de difícil acesso. A GeoOne oferece um curso completo de Processamento de Imagens de Drone utilizando WebODM e QGIS, proporcionando aos alunos mais de 30 horas de práticas para processamento e análise de imagens de drone aplicados à agricultura de precisão, análises ambientais, georreferenciamento e Reurb.

Vá Além! Transformando Algoritmos Python em um Plugin do QGIS
Para aqueles que desejam aprofundar seus conhecimentos, a GeoOne oferece um curso de PyQGIS. Este curso ensina como transformar algoritmos Python, como os apresentados neste tutorial, em plugins úteis para o QGIS. Isso permite a automatização de tarefas e a criação de ferramentas personalizadas para otimizar o trabalho de topografia e geoprocessamento.