Calibração de câmera para Mapeamentos com Drones
Você processa suas imagens de drone utilizando os parâmetros calibrados da câmera?
Neste post, você vai aprender sobre esses parâmetros de calibração e vamos lhe passar algumas dicas de como determinar esses parâmetros para utilizá-los no processamento de imagens de Drone, podendo garantir maior qualidade aos seus trabalhos de Topografia e Mapeamento 3D.
O que é Fotogrametria?
Antes de partir para a explicação dos parâmetros de calibração, é muito importante você entender o conceito de fotogrametria e qual a sua finalidade, traduzida através da Figura 1.
CONCEITO: A Fotogrametria (do grego: luz, descrição e medidas) é definida como a ciência aplicada, a técnica e a arte de extrair de fotografias métricas, a forma, as feições, as dimensões e a posição dos objetos nelas contidos.
Na fotogrametria, existem três principais fontes de deformações nas fotografias que podem afetar os resultados na fotogrametria, sendo elas: inclinação, efeito do relevo e distorções geométricas da câmera.
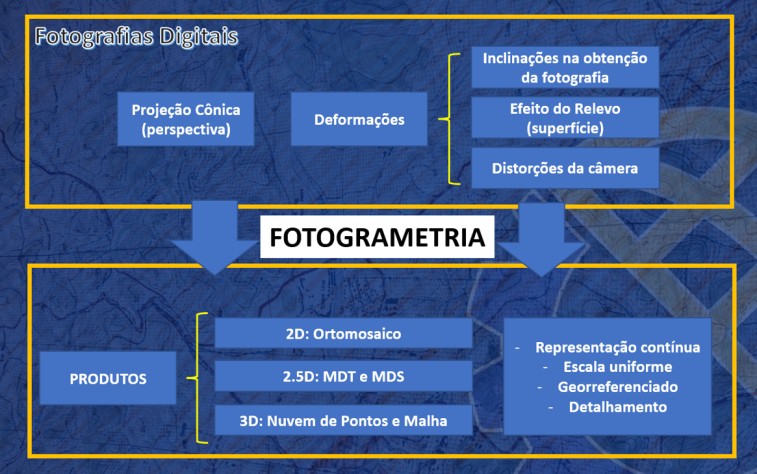
Essas deformações são modeladas matematicamente para se gerar produtos aerofotogramétricos georreferenciados, com uma representação contínua, em escala uniforme e garantindo o nível de detalhamento necessário para a sua finalidade. Os principais produtos gerados por meio da aerofotogrametria são:
- Ortomosaicos ou Ortofotos: São imagens retificadas que corrigem as deformações causadas pelo terreno, relevo e distorções da câmera, resultando em uma representação precisa da superfície terrestre. As ortofotos são utilizadas para mapeamento, planejamento urbano, monitoramento ambiental e análise de mudanças ao longo do tempo.
- Modelos Digitais de Superfície (MDS) e Modelos Digitais do Terreno (MDT): Os MDS representam a superfície da Terra, incluindo a vegetação, construções e outros objetos, enquanto os MDT representam a altura ou a elevação do terreno sem a consideração dos objetos acima dele. Esses modelos são utilizados em diversas aplicações, como análise do terreno, planejamento de drenagem, visualização 3D e simulações.
- Nuvens de Pontos e Malha 3D: São conjuntos de coordenadas 3D que representam os objetos e características presentes nas fotografias aéreas. As nuvens de pontos são usadas para criação de modelos tridimensionais, cálculo de volumes, extração de características e análise espacial.
Projeção cônica e efeito do terreno
A projeção e o efeito do terreno na fotogrametria têm um impacto significativo na obtenção de dados tridimensionais a partir de imagens bidimensionais. A compreensão desses efeitos e a aplicação de técnicas apropriadas são fundamentais para obter resultados precisos na reconstrução e mapeamento de terrenos usando fotogrametria.
A perspectiva afeta a forma como os objetos são vistos em uma imagem e pode distorcer a aparência real do terreno. Por exemplo, objetos próximos à câmera parecem maiores do que objetos mais distantes, e essa diferença de tamanho deve ser considerada ao realizar medições precisas na fotogrametria.
O efeito do terreno na fotogrametria também é relevante. A topografia do terreno pode introduzir variações nas imagens, especialmente em áreas com relevos acidentados. Superfícies inclinadas ou irregulares podem causar sombras, distorções geométricas e alterações na escala e na forma dos objetos na imagem.
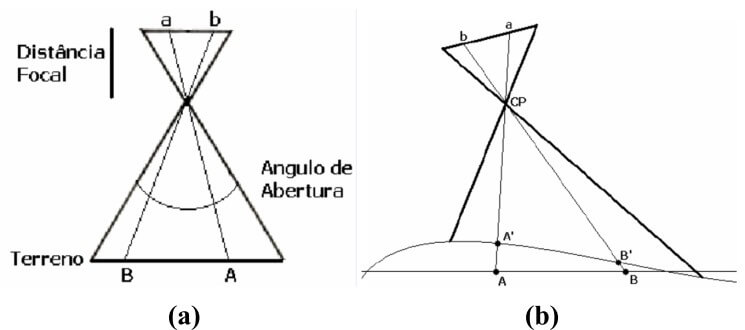
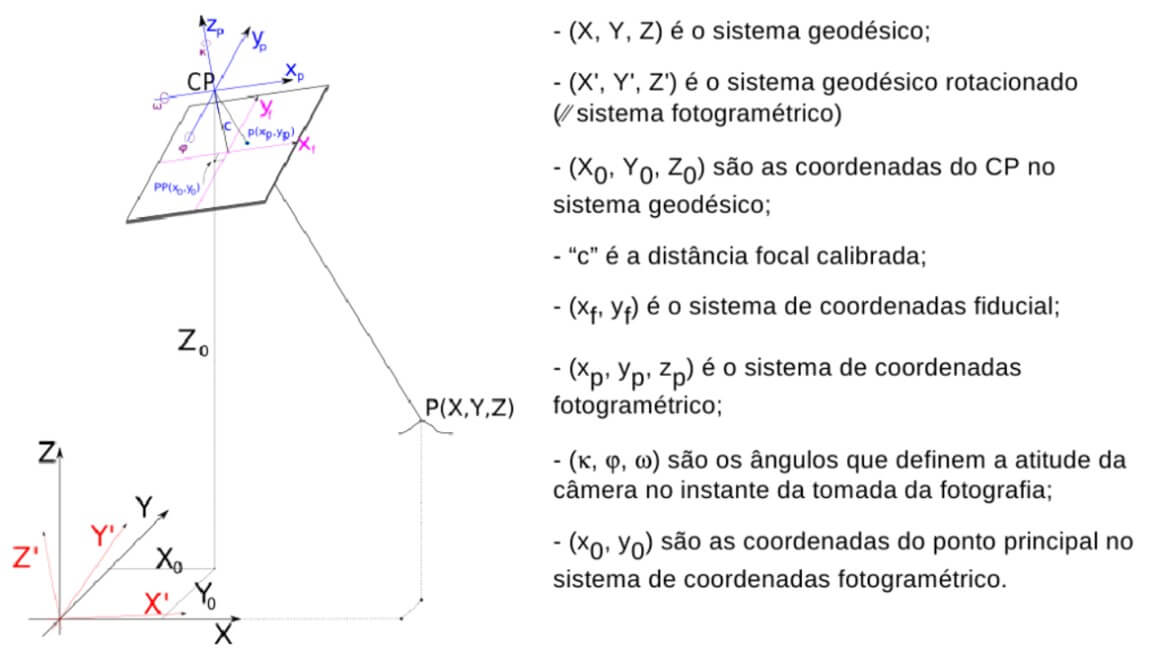
CP = Centro da Projeção = Centro Ótico da Objetiva
PP = Plano da Projeção = Plano do Filme Fotográfico, hoje sensor digital.
Principais problemas que afetam a aquisição de imagens
Antes de tratar das distorções que dem ser modeladas e corrigidas no mapeamento aerofotogramétrico, vale destacar alguns problemas que não são corrigidos e dependem basicamente da qualidade da câmera (sensor). Abaixo, são listados alguns dos principais efeitos que podem afetar a qualidade das fotografias (COELHO e BRITO, 2007):
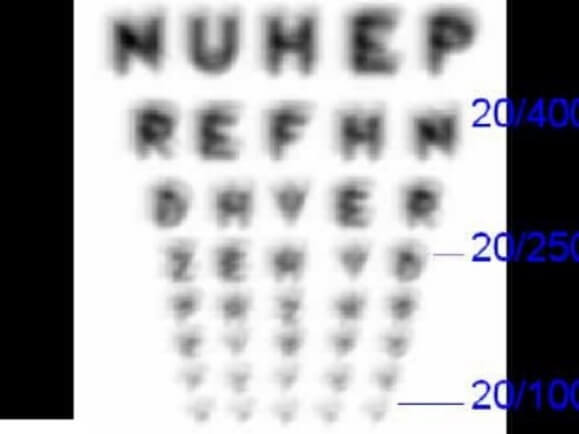
- Falta de nitidez: é um fator que pode afetar a qualidade da imagem, resultando em uma aparência geralmente embaçada, com detalhes menos definidos e menos clareza. Existem várias causas possíveis para a falta de nitidez, incluindo: vibração da câmera, velocidade do obturador inadequada, abertura incorreta do diafragma, qualidade da lente e distância focal incorreta.
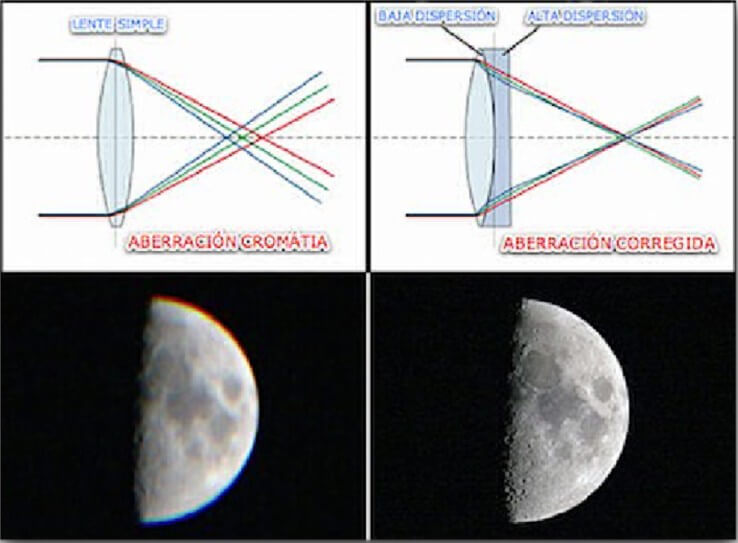
- Aberração cromática: É um efeito óptico que causa a separação das cores em diferentes pontos de uma imagem. Pode resultar em halos de cores ao redor dos objetos e redução na nitidez da imagem.
- Coma: Refere-se à distorção em forma de cometa que ocorre nas bordas das imagens, especialmente em lentes com grande abertura. Pode resultar em pontos de luz alongados ou distorcidos nas áreas periféricas da imagem.

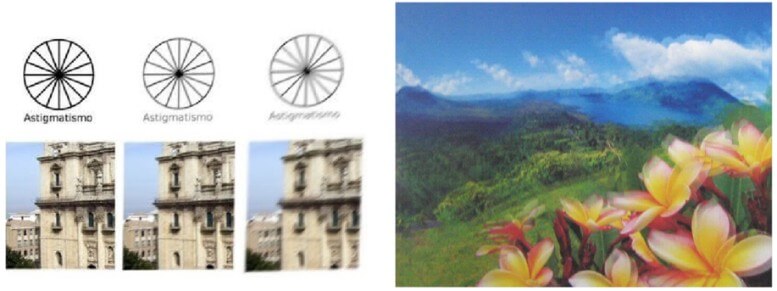
- Astigmatismo: É um tipo de distorção óptica que causa uma diferença na nitidez em diferentes direções. Pode resultar em objetos desfocados ou distorcidos em certas orientações na imagem.
- Curvatura de campo: É a curvatura da imagem que ocorre quando objetos em diferentes distâncias do plano focal não estão todos focados ao mesmo tempo. Pode resultar em áreas fora de foco nas bordas ou cantos da imagem.
- Aberração de esfericidade: Refere-se à distorção óptica que ocorre devido à forma esférica das lentes. Pode resultar em distorção de forma ou tamanho dos objetos na imagem, especialmente nas bordas.
- Distribuição de luz no plano focal: É a variação de brilho ou intensidade da luz em diferentes partes da imagem. Pode resultar em áreas subexpostas ou superexpostas, afetando o contraste e a qualidade geral da imagem.
- Efeitos atmosféricos: Incluem fenômenos como neblina, poluição do ar e umidade, que podem reduzir a nitidez, o contraste e a saturação das cores na imagem. Também podem causar perda de detalhes e redução da qualidade geral da imagem.
- Arrastamento da imagem: Refere-se ao deslocamento ou distorção da imagem devido ao movimento da câmera ou do objeto durante a exposição. Pode resultar em imagens borradas, linhas distorcidas ou duplicadas, e perda de detalhes.
Vale destacar que esses fatores não são simples de serem corrigidos e dependem diretamente da qualidade do sensor e das condições do ambiente em que a fotografia foi captada, impactando no resultado do processamento e geração dos produtos aerofotogramétricos (Leia: 8 dicas para garantir a qualidade no aerolevantamento com Drones).
Distorções geométricas
As distorções geométricas podem ser modeladas matematicamente para correção no processamento das fotografias do aerolevantamento. Existem dois tipos básicos de distorção: radial simétrica e descentrada (Brown, 1971). Essas distorções são modeladas por equações matemáticas e seus coeficientes devem constar no certificado de calibração de câmara.
Fotogrametria Analítica
Orientação Interior
A orientação interior define as características da câmera fotogramétrica, ou do sensor imageador, para a reconstituição da posição da fotografia em relação ao feixe perspectivo.
Objetivos da orientação interior:
- Determinar dos parâmetros da transformação afim entre o sistema de coordenadas da imagem digital e o sistema fiducial/fotogramétrico.
- Obter coordenadas fotogramétricas isentas de distorções geométricas.
Orientação Exterior
A orientação exterior se relaciona com o caminho do feixe perspectivo fora da câmera, ou seja, entre o ponto no espaço objeto e o ponto nodal da câmera fotográfica.
Condição de Colinearidade
A condição de colinearidade é um princípio fundamental na fotogrametria, que estabelece que três pontos não colineares em um espaço tridimensional podem ser representados unicamente em um plano de imagem bidimensional. Em outras palavras, a condição de colinearidade permite a projeção de pontos 3D em uma imagem 2D.
Equações de Colinearidade
As equações de colinearidade expressam a relação das coordenadas dos pontos no espaço objeto, ou seja, pontos 3D (X, Y, Z), com a de seus homólogos no espaço imagem, ou seja, pontos 2D (x, y).
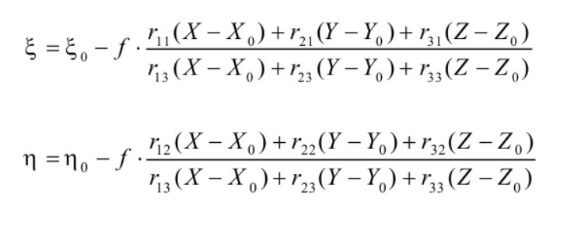
Essas equações descrevem a relação entre as coordenadas 3D do ponto no espaço e as coordenadas 2D do ponto na imagem, levando em consideração os parâmetros intrínsecos e extrínsecos da câmera. Essas equações são usadas em vários cálculos fotogramétricos, como a triangulação estereoscópica e a reconstrução 3D a partir de imagens.
Calibração da Câmera
A calibração é um procedimento para obtenção dos parâmetros intrínsecos da câmera para modelagem das distorções geométricas, cujo objetivo principal é a correta reconstrução do feixe perspectivo gerador da imagem.
Parâmetros de Calibração
Os parâmetros existentes, também chamados de parâmetros de calibração são: ponto principal (X0, Y0), distância focal (f), coeficientes de distorção radial simétrica (K1, K2, K3) e os coeficientes de distorção descentrada (P1, P2) (Bown, 1971).
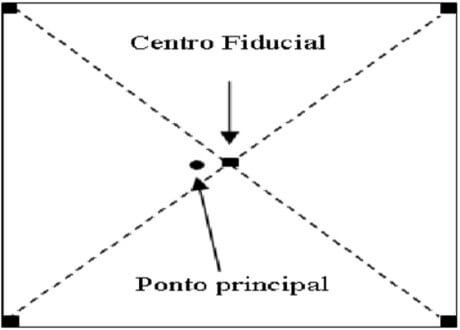
Deslocamento do Ponto Principal (X0, Y0)
É ocasionado pela não coincidência entre o eixo ótico da câmera e o centro fiducial da fotografia
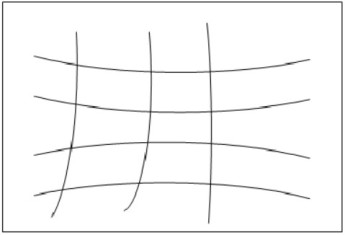
Distorção Radial Simétrica (K1, K2, K3, …)
Pode ser encarada como sendo a parcela não desejável da refração sofrida por um raio de luz ao atravessar uma lente. Desta forma, um raio de luz que antes de penetrar na câmera, forma um ângulo α com o eixo óptico, ao atravessar o sistema de lentes irá resultar em um ângulo α + 2α causando um deslocamento r na posição da imagem no plano do negativo (Andrade, 1998).
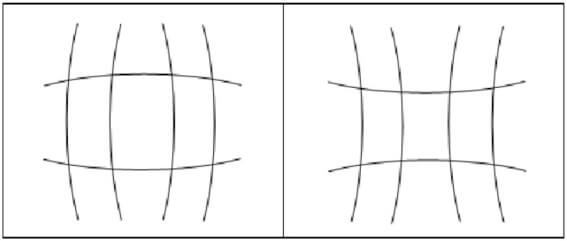
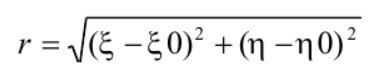
A distorção radial simétrica afeta a posição de um ponto imagem numa linha reta a partir do ponto principal, no sentido radial e pode ser quantificada para um ponto.

Onde
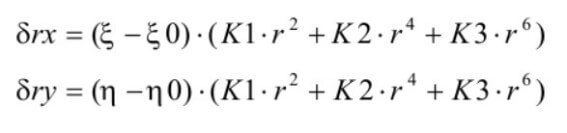
Decomposição nos eixos do Espaço Imagem:
Distorção descentrada (P1, P2)
A distorção descentrada é causada pelo não alinhamento das lentes do sistema da câmara. Ela acontece pela impossibilidade do fabricante em alinhar perfeitamente os eixos ópticos das lentes que compõe uma objetiva.
Essa distorção resulta em um deslocamento na imagem e é composta pelas componentes tangencial e radial simétrica. Suas equações modificadas para expressar esta distorção em cada eixo consideram apenas os dois primeiros termos:

Equações de colinearidade acrescido dos parâmetros de calibração da câmera:
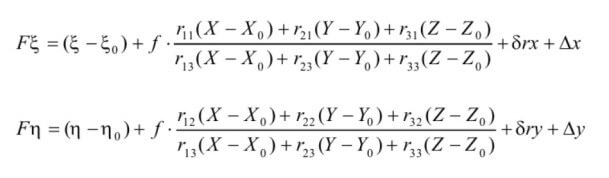
O ajustamento dessas equações permite realizar a auto-calibração, ou seja, a determinação dos parâmetros.
Como realizar a calibração da Câmera na prática?
Opção 01 – Auto-calibração
Dicas do voo para obter melhores na auto-calibração (Toffanin, 2019):
- Capturar imagens em diferentes elevações
- Variar ângulos de captura (não apenas nadir)
- Plano de voo cruzado
- Evitar excesso de sobreposição
Objetivo: Reutilizar os parâmetros calculados em outros projetos (Figura 11)
Opção 02 – Alvo de calibração
Este método não chega a resultados tão bons quanto a auto-calibração (Toffanin , 2019).
Indicado quando não é possível coletar um conjunto de dados para a auto-calibração.
Etapas:
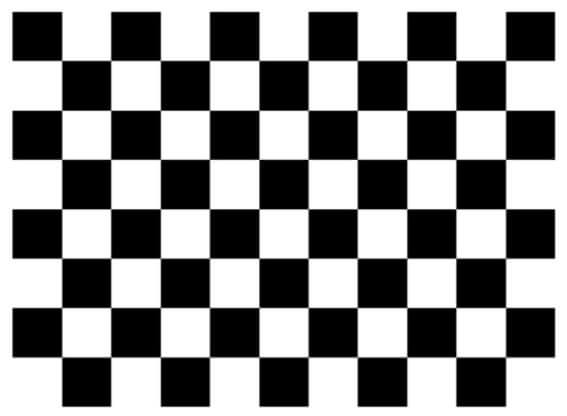
- Gerar um alvo com o padrão de tabuleiro de xadrez 11 x 9 (io)
- Carregar em um Monitor ou TV
- Tirar de 5 a 9 fotografias desse alvo de calibração a partir de diferentes ângulos, mantendo o foco constante (desabilitar o auto-foco).
- Usar o software Adobe Lens Profile Creator para determinar os parâmetros de calibração.
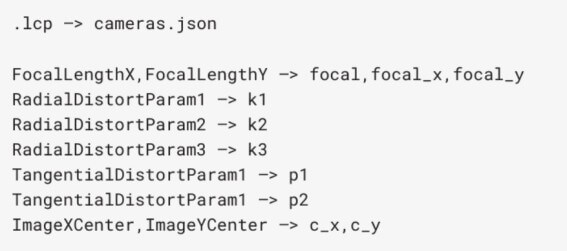
- Preencher o arquivo de cameras.json a partir do arquivo .lcp gerado no Adobe.
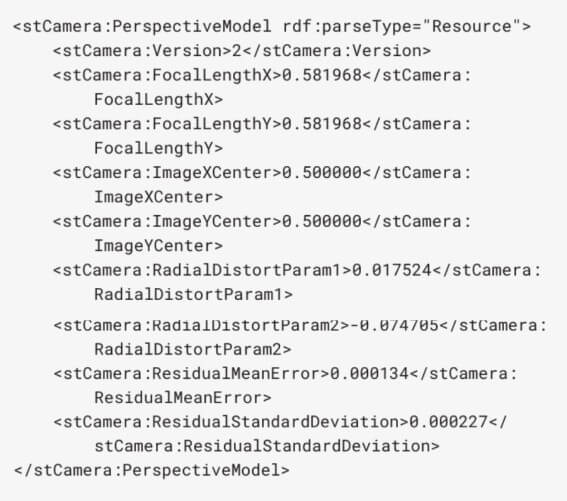
Transformação do arquivo .lcp para câmeras.json:
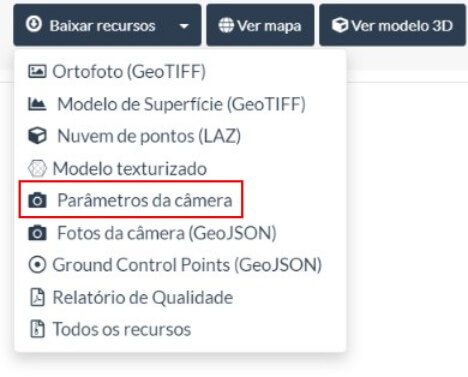
Como configurar os parâmetros da câmera no WebODM?
REFERÊNCIAS:
ANDRADE, JB de. Fotogrametria. Curitiba: SBEE, v. 258, 1998.
COELHO, Luiz; BRITO, Jorge Nunes. Fotogrametria digital. EdUERJ, 2007.
MAZON, Hugo; ZACCHI, Giancarlo Philippi; MARTINS, Ricardo. Calibração de câmeras e fontes de erros para triangulação fotogramétrica. XV Simpósio Brasileiro de Sensoriamento Remoto-SBSR, p. 9000-9008, 2011.
SILVEIRA, F. J. C. Fototriangulação pelo Método dos Feixes Perspectivos. Msthesis, Departamento, v. 198, 2004.
TOFFANIN, P. OpenDroneMap: The Missing Guide. A Practical Guide To Drone Mapping Using Free and Open Source Software. 2019.
Duane, C. B. (1971). Close-range camera calibration. Photogramm. Eng, 37(8), 855-866. https://www.asprs.org/wp-content/uploads/pers/1971journal/aug/1971_aug_855-866.pdf
Agisoft. Camera calibration parameters. https://agisoft.freshdesk.com/support/solutions/articles/31000158119-what-does-camera-calibration-results-mean-in-metashape-