Como Determinar a Velocidade Ideal do Drone para Mapeamento
Guia Completo para Evitar Erros em Fotogrametria
A velocidade do drone é um dos fatores mais críticos e, paradoxalmente, mais negligenciados no planejamento de voos fotogramétricos. Mesmo com sensores de alta qualidade, planejamento adequado e uso de técnicas avançadas como PPK, uma velocidade mal definida pode comprometer todo o aerolevantamento.
Na prática, velocidades excessivas levam a:
imagens borradas (motion blur);
falhas de sobreposição frontal real;
dificuldades na correspondência de pontos (tie points);
degradação da geometria do bloco fotogramétrico;
perda de precisão posicional e altimétrica;
retrabalho e aumento de custos operacionais.
Ainda assim, muitos pilotos escolhem a velocidade “no automático” ou “no olho”, sem compreender que velocidade, GSD, shutter, overlap e GNSS são variáveis interdependentes.
Este artigo apresenta uma abordagem técnica, fundamentada e aplicada, explicando como determinar a velocidade ideal do drone, considerando:
geometria da imagem;
sobreposição frontal;
tempo de exposição;
desfoque por movimento;
limitações do GNSS em PPK/RTK;
condições reais de campo;
características do terreno e do alvo mapeado.
🎯 Por que a velocidade do drone é tão determinante?
A fotogrametria baseia-se na reconstrução tridimensional a partir de múltiplas imagens sobrepostas, assumindo que essas imagens sejam:
nítidas
bem distribuídas espacialmente
geometricamente consistentes
A velocidade do drone atua diretamente nessas três condições. Ela influencia:
a distância entre imagens consecutivas;
o deslocamento do sensor durante a exposição;
a distância percorrida entre épocas GNSS;
a estabilidade do footprint em presença de vento.
Por isso, a velocidade deve sempre respeitar três limites técnicos fundamentais:
Limite imposto pela sobreposição frontal (frontlap)
Limite imposto pelo desfoque por movimento (motion blur)
Limite imposto pela sincronização GNSS (PPK)
🟦 1. Sobreposição frontal (Frontlap)
A sobreposição frontal garante que um mesmo ponto do terreno seja observado em várias imagens consecutivas, condição essencial para a extração de tie points e para a estabilidade do ajuste em bloco.
Se o drone percorre uma distância excessiva entre duas fotos, o frontlap real torna-se menor do que o planejado, mesmo que o software de voo esteja configurado corretamente.
Relação geométrica básica
Considere:
 : comprimento do footprint da imagem no solo
: comprimento do footprint da imagem no solo : sobreposição frontal desejada (em fração)
: sobreposição frontal desejada (em fração)
 : comprimento do footprint da imagem no solo
: comprimento do footprint da imagem no solo : sobreposição frontal desejada (em fração)
: sobreposição frontal desejada (em fração)A distância máxima permitida entre centros de imagens é:
(1) 
Se a câmera dispara a cada Δt segundos, a velocidade máxima admissível é:
(2) 
Velocidades superiores a esse limite resultam em perda efetiva de overlap, afetando diretamente a reconstrução fotogramétrica.
🟩 2. Tempo de exposição e desfoque por movimento (Motion Blur)
Mesmo com estabilização mecânica e eletrônica, a câmera permanece exposta durante um intervalo de tempo  . Durante esse período, o drone continua se deslocando.
. Durante esse período, o drone continua se deslocando.
Se o deslocamento no solo for significativo, ocorre desfoque por movimento, principalmente perceptível em:
áreas urbanas;
telhados;
fachadas;
vegetação;
terrenos com alta textura.
Critério clássico de engenharia
Adota-se como regra prática que o deslocamento no solo durante a exposição seja inferior a 1/3 do GSD:
(3) 
Isolando a velocidade máxima:
(4) 
Esse limite torna-se cada vez mais restritivo à medida que o GSD diminui (voos mais baixos ou sensores de maior resolução).
🟧 3. Velocidade de voo e PPK: o que realmente limita a precisão
Em levantamentos com PPK (Post-Processed Kinematic), é comum tentar estabelecer um limite de velocidade a partir da frequência do receptor GNSS ou da distância percorrida entre épocas consecutivas. Embora esses parâmetros tenham relevância operacional, eles não representam o principal fator limitante da precisão do georreferenciamento das imagens.
O aspecto central que relaciona velocidade e PPK é o sincronismo temporal entre o instante real de exposição da câmera e o timestamp utilizado no processamento GNSS.
🔹 O papel da frequência do GNSS
A frequência do receptor GNSS influencia principalmente a densidade de amostragem da trajetória, sendo relevante para a estabilidade da interpolação, mas não corrige erros de sincronismo temporal.
Como regra prática, utiliza-se a frequência apenas como um critério de sanidade, garantindo que a distância percorrida entre épocas GNSS não seja excessiva:
(5) 
onde:
 é a distância entre épocas GNSS;
é a distância entre épocas GNSS; é a velocidade de voo do drone;
é a velocidade de voo do drone; é a frequência do receptor.
é a frequência do receptor.


 é a frequência do receptor.
é a frequência do receptor.Esse critério, entretanto, não deve ser interpretado como um limitador direto da velocidade, mas apenas como um requisito mínimo para a qualidade da trajetória GNSS.
🔹 Erro temporal e deslocamento espacial
Caso exista uma instabilidade temporal residual no sincronismo câmera–GNSS, esse erro se manifesta no terreno como um deslocamento proporcional à velocidade de voo. Essa relação pode ser expressa de forma aproximada por:
(6) 
onde:
Δx é o erro horizontal induzido no terreno;
δt representa a instabilidade temporal residual (jitter) do sincronismo, após eventual compensação de uma latência fixa.
Essa equação mostra que a velocidade não cria o erro, mas apenas amplifica uma instabilidade temporal já existente.
🔹 Velocidade máxima sugerida a partir do erro tolerável
A partir dessa relação, é possível estimar uma velocidade máxima sugerida pelo sincronismo temporal, definindo previamente qual erro espacial é tolerável apenas por efeitos de sincronismo.
Isolando a velocidade, obtém-se:
(7) 
onde:
 é o erro espacial máximo admissível;
é o erro espacial máximo admissível;δt é a instabilidade temporal residual do sistema.
Um critério prático e coerente é relacionar  ao GSD, por exemplo:
ao GSD, por exemplo:
 para aplicações topográficas rigorosas;
para aplicações topográficas rigorosas; para mapeamentos menos exigentes.
para mapeamentos menos exigentes.


🔹 Exemplo prático
Considere um voo com:
GSD=2,5 cm=0,025 m;
erro tolerável por sincronismo:

instabilidade temporal residual estimada (geralmente da ordem de 0,5-2 ms para drones DJI):
δt=2 ms=0,002 s

Aplicando a equação:
(8) 
Esse valor já se encontra dentro da faixa operacional comumente utilizada em mapeamentos fotogramétricos profissionais. Se a instabilidade temporal for ainda menor, por exemplo, δt=1 ms, a velocidade admissível dobra, alcançando valores superiores a 10 m/s.
🔹 Interpretação correta do resultado
O valor de velocidade estimado a partir do sincronismo temporal não deve ser interpretado como um limite rígido imposto pelo PPK, mas como uma indicação da ordem de grandeza a partir da qual um erro temporal residual poderia gerar um erro espacial significativo no terreno.
Quando o sistema de geotagging apresenta bom sincronismo, com latência temporal fixa compensada e instabilidade residual reduzida, esse valor tende a ser elevado, tornando velocidades usuais de 5 a 10 m/s plenamente compatíveis com levantamentos PPK de alta qualidade.
🟫 4. Fatores operacionais que exigem velocidades menores
Mesmo respeitando os limites matemáticos, fatores reais de campo exigem margens adicionais:
Relevo acidentado: variação do GSD e ocultamentos
Ambiente urbano: maior sensibilidade a blur
Baixa luminosidade: necessidade de maior tempo de exposição
Vento: inclinação do drone altera o footprint
Intervalo mínimo entre fotos: limita a velocidade máxima viável
Esses fatores justificam a adoção de coeficientes de segurança no cálculo final.
🟦 5. Cálculo da velocidade ideal (modelo integrado)
A velocidade ideal deve ser o menor valor entre todos os limites, com fator de segurança operacional:
(9) 
O fator 0,7 cobre variações de vento, relevo, resposta da câmera e imprecisões do sistema de voo.
🟨 6. Exemplo completo – Mavic 3 Enterprise a 120 m
Dados do cenário
Altura de voo:

GSD:

Sobreposição frontal:

Intervalo entre fotos:

Tempo de exposição:

Fração do erro tolerável (PPK sync):

Instabilidade temporal residual estimada:

Erro espacial tolerável:









Footprint no solo
(10) 
Limite pelo frontlap
(11) 
Limite pelo blur
(12) 
Limite pelo PPK
(13) 
(14) 
Velocidade ideal
O limitante é o menor entre os três:
min(12,69, 10,67, 16,0)=10,67 m/s
(15) 
Cálculo automático da velocidade ideal com o GeoFlight Planner (QGIS)
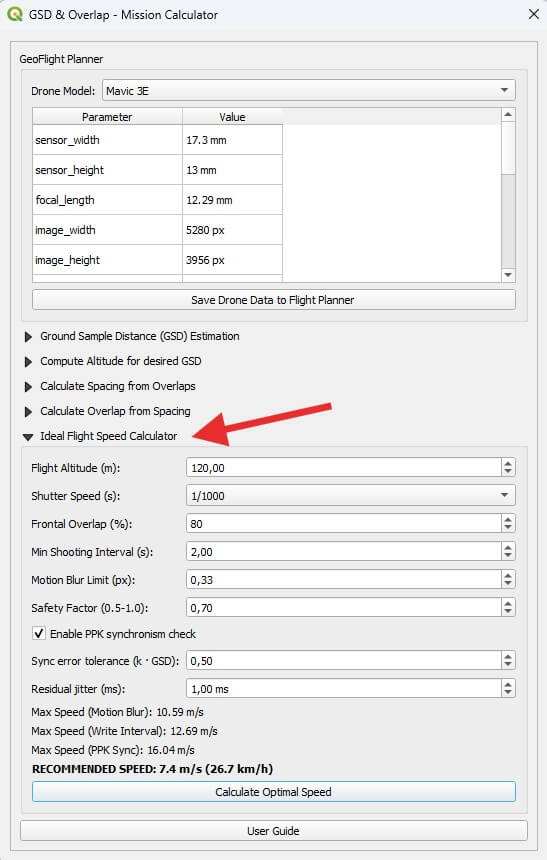
Todo o procedimento apresentado neste artigo pode ser executado de forma rápida e automatizada no plugin GeoFlight Planner, desenvolvido pela GeoOne e disponibilizado gratuitamente no QGIS.
Como ilustrado no print da ferramenta (Figura — GeoFlight Planner: Ideal Flight Speed Calculator), o usuário informa apenas os parâmetros reais da missão — altura de voo, shutter, sobreposição frontal, intervalo entre fotos e critérios de sincronismo PPK — e o plugin calcula automaticamente os limites individuais (frontlap, motion blur e sincronismo temporal), indicando ao final a velocidade recomendada de voo, já com fator de segurança operacional aplicado.
Essa abordagem permite que conceitos teóricos de fotogrametria e GNSS sejam incorporados diretamente ao planejamento prático, reduzindo erros empíricos e garantindo decisões técnicas consistentes ainda na fase de pré-voo (veja mais dicas sobre a GSD & Overlap – Mission Calculator).
📊 Tabela prática de referência
| Cenário | Velocidade recomendada |
|---|---|
| Topografia urbana e REURB | 5 – 8 m/s |
| CAR e GeoINCRA | 6 – 12 m/s |
| Agricultura de precisão | 8 – 15 m/s |
| Inspeções de fachadas | 1 – 2 m/s |
| Áreas montanhosas | 4 – 6 m/s |
| Mapeamento 3D | ≤ 7,5 m/s |
| Rolling shutter | reduzir 20–40% |
🎓 Curso de Plano de Voo com QGIS e GeoFlight Planner (GeoOne)
Todo esse conteúdo teórico é aplicado na prática no Curso de Plano de Voo da GeoOne, onde o aluno aprende a:
calcular GSD, footprint e overlap diretamente no QGIS;
definir velocidade ideal de voo com base em parâmetros reais;
planejar missões considerando relevo, vento e objetivo técnico;
configurar voos para topografia, CAR, REURB e agricultura;
gerar planos de voo profissionais utilizando o GeoFlight Planner;
exportar missões para diferentes plataformas e drones;
evitar erros clássicos que comprometem a precisão do mapeamento.
📌 O foco do curso é planejamento técnico consciente, conectando fotogrametria, GNSS e geoprocessamento, exatamente como exigido em projetos profissionais e institucionais.

📚 Referências