Como calcular área no SGL?
Realizar o cálculo exato de área de um imóvel de grande extensão sempre foi um desafio. Vários fatores podem interferir nos resultados, por exemplo, a técnica de levantamento topográfico, a precisão dos equipamentos, o tipo de projeção e suas distorções, além da altitude média onde esse imóvel se localiza. Esses fatores, muitas vezes, passam despercebidos por profissionais de agrimensura e geoprocessamento.
A norma do INCRA estabelece em seu Manual Técnico de Posicionamento que a área de imóveis rurais deve ser calculada a partir de coordenadas referenciadas ao Sistema Geodésico Local (SGL), tal procedimento possibilita resultados praticamente em “verdadeira grandeza” quando comparado aos valores reais medidos no Terreno, obtendo-se áreas e perímetros mais fieis, se comparado às projeções cartográficas mais comuns.
Neste post, vamos explicar alguns conceitos e explorar referências relacionadas ao SGL, apresentando suas fórmulas matemáticas e mostrando como esses cálculos podem ser executados na prática com Python ou no próprio plugin LFTools, utilizando o software QGIS.
O que é um Sistema Geodésico Local (SGL)?
O SGL consiste em um sistema de referência de coordenadas de eixos ortogonais (E, N, U), onde o eixo “N” aponta para o norte geodésico, o eixo “E” aponta para a direção leste, estando ambos contidos no plano perpendicular a normal ao elipsoide que passa por um ponto arbitrado como origem do sistema, com o eixo “U” coincidindo com a direção desta normal (Figura 1).

Agora vamos entender melhor os sistemas de coordenas apresentados na Figura 1, detalhando o que vem a ser coordenadas geodésicas, geocêntricas e topocêntricas.
Coordenadas geodésicas (λ, ϕ, h)
Coordenadas geodésicas remete a um sistema de coordenadas baseado em um elipsoide, com coordenas as curvilíneas: latitude geodésica ϕ (na direção norte/sul) e longitude geodésica λ na (na direção leste/oeste); e a altitude geodésica h (também conhecida como altitude elipsoidal ou geométrica).
Coordenadas geocêntricas (X, Y, Z)
O sistema de coordenadas geocêntricas, também conhecidas como ECEF, do Earth-centered, Earth-fixed, é um sistema de referência espacial cartesiano que representa qualquer local nas proximidades da Terra, incluindo sua superfície, interior, atmosfera e áreas externas circundantes no espaço, sendo mais utilizada para o rastreio de órbitas de satélites no posicionamento GNSS.
Suas medidas X, Y e Z tem como origem o centro de massa da Terra, coincidindo aproximadamente o eixo Z com o seu eixo de rotação, e o eixo X (positivo) direcionado ao ponto de encontro da linha do Equador com o Meridiano de Greenwich.
Coordenadas topocêntricas (E, N, U)
As coordenadas ENU são formadas considerando-se um plano perpendicular à normal ao elipsoide passando por um ponto de origem, fixado em um local específico.
As medidas lineares são dadas em metros para os seguintes eixos:
- East (E), na direção da linha do paralelo de origem;
- North (N), na direção da linha meridiana de origem; e
- Up (U), na direção da normal ao elipsoide.
Como definir um Sistema Geodésico Local?
Para a transformação de coordenadas geodésicas ou geocêntricas em coordenadas topocêntricas no SGL, primeiro é necessário definir o elipsoide, ou seja, os parâmetros de semi-eixo maior e achatamento. Por exemplo, no caso de utilização do Sistema Geodésico de Referência SIRGAS2000, o elipsoide GRS80 tem a = 6.378.137m (semi-eixo maior) e f = 298.257222101 (achatamento).
O segundo critério deve ser adotar um ponto de origem para o sistema, de preferência sendo o ponto centroide do polígono da área mapeada, considerando-se a média das altitudes na região (França et al, 2020).
De acordo com o INCRA, deve-se adotar a média das coordenadas da parcela em questão como origem do sistema, para a conversão de coordenadas cartesianas geocêntricas para o SGL (INCRA, 2013a).
É importante ressaltar que a NBR 14.166 de 1998 alerta sobre a área máxima de abrangência do sistema que considera o plano tangente ao elipsoide de referência. Como ocorre uma abstração da curvatura da terra nessa extensão, os valores de 50 Km x 50 Km não devem ser ultrapassados (ABNT, 1998), pois fora desses limites os erros são bastante acentuados.
Qual a principal diferença de um Sistema Geodésico Local e Topográfico Local?
O Sistema Geodésico Local (SGL) é adotado nos trabalhos de georreferenciamento de imóveis rurais e, segundo o Manual Técnico de Posicionamento (INCRA, 2013a), pode ser aplicado no cálculo de áreas, no uso do método de posicionamento por geometria analítica e em projetos de parcelamento/desmembramento (Simões et al, 2017).
Já o Sistema Topográfico Local (STL), segundo a NBR 14166/98, consiste no sistema de representação, em planta, das posições relativas de pontos de um levantamento topográfico com origem em um ponto de coordenadas geodésicas conhecidas (ABNT, 1998). No Brasil, o STL é adotado em levantamentos por alguns municipais para fins de cadastro.
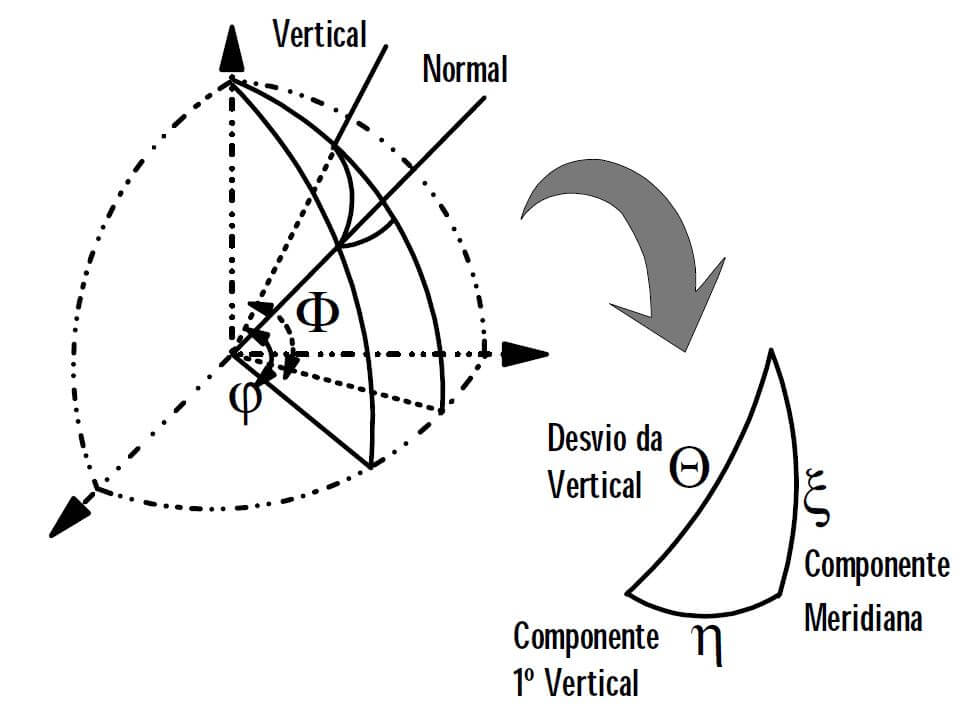
Resumidamente, no SGL o plano é perpendicular à Normal ao elipsoide, já no STL o plano é perpendicular à Vertical (linha de prumo), e coincide com o horizonte da estação. Já a direção dos eixo norte-sul é dada pelo meridiano astronômico do lugar. O SGL é mais adequado para trabalhar com dados GNSS, já o STL é mais indicado para trabalhos com Estação Total, Teodolitos e Níveis, pois é possível calcular os componentes do desvio da vertical e transformação do STL para o SGL.
Como realizar a transformação de coordenadas geodésicas para o SGL?
Para a transformação entre os sistemas de coordenadas geodésicas, geocêntricas e topocêntricas, podem ser utilizas as equações e algoritmos apresentados a seguir.
Geodésicas para geocêntricas
Fórmulas:
(1) 
(2) 
(3) 
(4) 
(5) 
Algoritmo (Python):
# Conversão de coordenadas geodésicas para geocêntricas
def geod2geoc(lon, lat, h, a, f):
lon = radians(lon)
lat = radians(lat)
e2 = f*(2-f) # primeira excentricidade
N = a/sqrt(1-(e2*sin(lat)**2))
X = (N+h)*cos(lat)*cos(lon)
Y = (N+h)*cos(lat)*sin(lon)
Z = (N*(1-e2)+h)*sin(lat)
return (X,Y,Z)
Geocêntricas para geodésicas
(conforme Resoluções do IGBE, 1989 e 2005)
Fórmulas:
(6) 
(7) 
(8) 
(9) 
(10) 
(11) 
(12) 
(13) 
Algoritmo (Python):
# Conversão de coordenadas geocêntricas para geodésicas
def geoc2geod(X, Y, Z, a, f):
b = a*(1-f)
e2 = f*(2-f) # primeira excentricidade
e2_2 = e2/(1-e2) # segunda excentricidade
tg_u = (a/b)*Z/sqrt(X**2 + Y**2)
sen_u = tg_u/sqrt(1+tg_u**2)
cos_u = 1/sqrt(1+tg_u**2)
lon =arctan(Y/X)
lat = arctan( (Z+ e2_2 * b * sen_u**3) / (sqrt(X**2 + Y**2) - e2 * a * cos_u**3))
N = a/sqrt(1-(e2*sin(lat)**2))
h = sqrt(X**2 + Y**2)/cos(lat) - N
lon = lon/pi*180
lat = lat/pi*180
return (lon, lat, h)
Geocêntricas para Topocêntricas
Fórmula:
(14) 
Algoritmo (Python):
# Conversão de Coordenadas Geocêntrica para Topocêntricas
def geoc2enu(X, Y, Z, lon0, lat0, Xo, Yo, Zo):
lon = radians(lon0)
lat = radians(lat0)
M = matrix(
[
[ -sin(lon), cos(lon), 0 ],
[ -sin(lat)*cos(lon), -sin(lat)*sin(lon), cos(lat)],
[ cos(lat)*cos(lon), cos(lat)*sin(lon), sin(lat)]
]
)
T = matrix(
[[X - Xo], [Y-Yo], [Z-Zo]]
)
Fo = matrix([[15e4],[25e4],[0]]) # False E and N
R = M*T + Fo
return (R[0,0], R[1,0], R[2,0])
Topocêntricas para Geocêntricas
Fórmula:
(15) ![\begin{gather*} \begin{bmatrix} X \\ Y\\Z \end{bmatrix} = \left[\begin{matrix}-sen\left(\lambda\right)&-sen\left(\varphi\right).cos{\left(\lambda\right)}&\cos{\left(\varphi\right)}.cos{\left(\lambda\right)}\\cos{\left(\lambda\right)}&-sen\left(\varphi\right).sen\left(\lambda\right)&\cos{\left(\varphi\right)}.sen\left(\lambda\right)\\0&\cos{\left(\varphi\right)}&sen\left(\varphi\right)\\\end{matrix}\right] . \begin{bmatrix} E-150.000 \\ N-250.000\\U \end{bmatrix} + \begin{bmatrix} X_{0} \\ Y_{0}\\Z_{0} \end{bmatrix} \end{gather*}](https://geoone.com.br/wp-content/ql-cache/quicklatex.com-32b808cd7cfd82019b942890dc54637c_l3.png "Rendered by QuickLaTeX.com")
Algoritmo (Python):
# Conversão de Coordenadas Topocêntricas para Geocêntrica
def enu2geoc(E, N, U, lon0, lat0, Xo, Yo, Zo):
lon = radians(lon0)
lat = radians(lat0)
Fo = matrix([[15e4],[25e4],[0]]) # False E and N
M = matrix(
[
[ -sin(lon), -sin(lat)*cos(lon), cos(lat)*cos(lon)],
[ cos(lon), -sin(lat)*sin(lon), cos(lat)*sin(lon)],
[ 0 , cos(lat), sin(lat) ]
]
)
T = matrix(
[[E], [N], [U]]
)
R = M*(T-Fo) + [[Xo], [Yo], [Zo]]
return (R[0,0], R[1,0], R[2,0])
Como calcular a área no SGL?
Para o cálculo de área no SGL é necessário que o polígono tenha coordenadas com a dimensão Z.
O QGIS segue os padrões da Open Geospatial Consortium (OGC) e esse tipo de geometria é definido como PolygonZ, ou MultiPolygonZ, para uma coleção de geometrias do tipo polígono.
Para o cálculo de área no SGL, é possível utilizar as formulações e algoritmos disponibilizados acima para transformação de coordenadas, ou simplesmente utilizar as ferramentas e funções do plugin LFTools diretamente no QGIS.
Assista a aula abaixo e confira como é simples e prático fazer essas transformações:
Se você deseja aprender mais sobre o uso do QGIS para realizar trabalhos profissionais de forma automatizada, então lhe convidamos a conhecer nosso curso de Automatização de Plantas e Memoriais Descritivos no QGIS com apenas 3 cliques:
Inscreva-se em nossa plataforma de cursos:

REFERÊNCIAS
ABNT. NBR 14166: 1998. Rede de Referência Cadastral Municipal – Procedimento.
IBGE. (1989). Resolução No 23, de 21 de fevereiro de 1989.
IBGE. (2005). Resolução No 01, de 25 de fevereiro de 2005.
INCRA. MANUAL TÉCNICO DE POSICIONAMENTO: Georreferenciamento de Imóveis Rurais. 1ª Edição. Brasília. 2013a. Disponível em: manual_tecnico_posicionamento_1ed.pdf (incra.gov.br)
INCRA. NORMA TÉCNICA PARA GEORREFERENCIAMENTO DE IMÓVEIS RURAIS. 3ª Edição. Brasília. 2013b. Disponível em: norma_tecnica_georreferenciamento_imoveis_rurais_3ed.pdf (incra.gov.br)
França, L. L. S. D., Seixas, A. D., Gama, L. F., & Moraes, J. N. D. (2021). OPTIMIZED DETERMINATION OF 3D COORDINATES IN THE SURVEY OF INACCESSIBLE POINTS OF BUILDINGS-EXAMPLE OF APPLICATION IMPLEMENTED IN FREE SOFTWARE. Boletim de Ciências Geodésicas, 27. https://www.researchgate.net/publication/352817150_OPTIMIZED_DETERMINATION_OF_3D_COORDINATES_IN_THE_SURVEY_OF_INACCESSIBLE_POINTS_OF_BUILDINGS_-_EXAMPLE_OF_APPLICATION_IMPLEMENTED_IN_FREE_SOFTWARE_Determinacao_otimizada_de_coordenadas_3D_no_levantamen
Simões, D. P.; Albarici, F. L.; Borges, P. A. F. (2017). Análise comparativa das coordenadas no Sistema Geodésico Local e no Sistema Topográfico Local. R. bras. Geom., Curitiba, v. 5, n. 1, p. 062-081.